Adapted walker with hand support
Abstract
A 2 year old girl who has Spinal Muscular Atrophy (SMA) has trouble standing and sitting up. At the moment, she is working on building up enough strength to be able to stand with some assistance. Our walker will provide the next step in her development. Our design will be a motorized walker that will help her walk by taking some of the load off of her. The walker will include a harness, safety straps, and a mesh-type seat, which will let her sit down if she got tired.

Problem Statement/overview of the need
A 2 year old girl who has Spinal Muscular Atrophy (SMA) has trouble standing and sitting up. At the moment, she is working on building up enough strength to be able to stand with some assistance. Our walker will provide the next step in her development.
Design Specifications
- The walker must have some type of harness and safety straps
- The walker needs to be motorized
- Needs to be able to support the child as she grows 20-60 lbs in weight & 34"-50" in height
- The walker & harnesses needs to be comfortable and non-abrasive to the skin
- Weighs around 30 to 40 pounds
- Needs to be able to move through doorways
Background research

1. There are many types of specialized walkers today that assist children in walking; however, there are few that have all the specific requirements that our child needs. The Trekker Gait Trainer shown on the right is very similar to what we need as far as mobility and face design; however, it is lacking a good harness to support the child's back, a motor to help the child walk when she is too weak, and a tray on the front, so that our child could place toys and food there.
2. The Trekker Gait Trainer as mentioned above would provide a very good base frame. We would most likely modify it, so that it could accommodate a motor, hand supports, a better harness, and a tray in front. We have been unable to find other walkers that fit these needs.
3. A downside to many walkers available today is the cost. Most can cost between 600 to 1000 dollars, and very few are designed where they can be used as the child grows. So, after a year or two of use, the walker becomes ineffective, and the family must buy a newer model. Our design would initially allow the child to sit down in a harness to aid in walking, and then as she gets stronger, the harness can be removed. Another downside or gap that we discovered were that many walkers are bulky and restrictive for various movements. We hope that our design will allow the child to move more freely in the walker if wanted, and that the walker would take up as least space as possible.
Conceptual Design
Design Concept 1
This concept piggybacks off a commercially available walker we would just add height adjustment, two motors, a joystick for control, a small battery, and the electrical components to make it all work. This design is likely the most feasible of our three designs due to the frame being commercially built giving us the reliability and longevity needed for such a project. With a little programming and wiring this would be more of a plug and play kind of design.
Design Concept 2
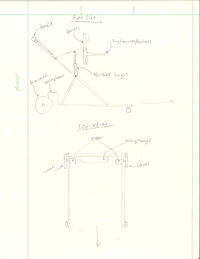
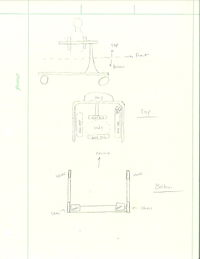
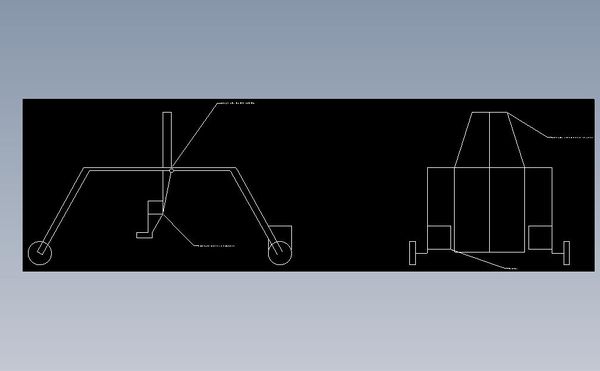
This design was inspired by a engine hoist used to pull car engines out of the engine bay. Instead of a chain for the engine we would have a specialized harness that would "grow" as the child grows. This walker would also be powered by two independent motors and would have a handle on the back per the therapists request. This design is stable however by the nature of the motors in the back would be hard to steer in tight quarters.
Design Concept 3
This design is based around a standard walker with support for both torso and legs. The leg supports will fold out of the way to allow for it to be used as an un-powered walker. It will include two independent motors controlled by a simple tiller system. The motors will drive the wheels via sprocket gears and be detachable.
Evaluate concepts/select candidate
| Specs | Design 1 | Design 2 | Design 3 |
|---|---|---|---|
| Material | aluminum | aluminum | aluminum |
| Estimated Cost ($) | *1500 | 700 | 600 |
| Weight (lb) | 30 | 40 | 35 |
| Functionality | high | modular | average |
*This is the price if we bought a pre-existing walker and special harnesses that come with it. If we were to make the walker, the price would be $700-$900.
- As of right now, we are leaning towards Design Concept 1, because it's design is closest to what the family and therapist desires. The design would have a seat so that the child could rest while she moves the walker around using the joystick. We would also be able to modify this design to be adaptable and "grow" with the child as she grows.
Detailed Design
Description of selected design
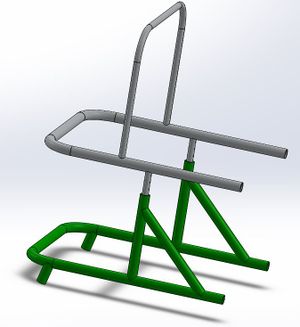
The final design is very similar to a commercially available walker, we are just adding height adjustment, two motored wheels, a joystick for control, battery, the electrical components to make it all work, and the various harnesses to make it supportive. We wanted as little stuff sticking out of the design as possible for the little girls safety and so that nothing will get damaged while moving through tight quarters. We have designed this walker to be very modular and can be easily adjusted for height changes.
Detailed description of selected design
Analysis
Describe three types of analysis to be performed on the design
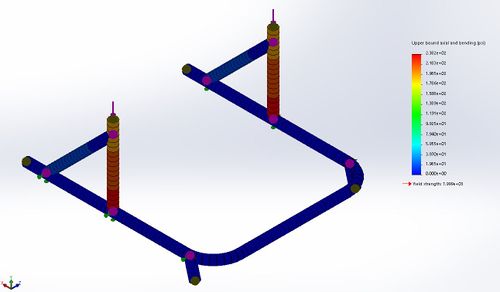
Engineering analysis 1
Engineering analysis 2
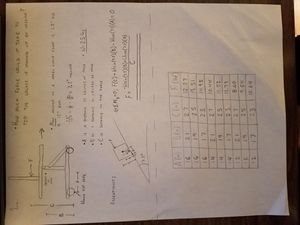
For our 2nd Engineering Analysis, we did a tipping analysis to see how much force was needed to tip the walker over on a steep embankment. We chose a 12.5% grade (which is the steepest incline that a powered wheelchair is allowed to go up.
Engineering analysis 3
For our third engineering analysis we chose a approximate total weight for the walker/motor system. As this is a walker for a young girl, the weight is a key aspect.
Our weight for the frame of the walker will be approximately 9.7 lbs.
The motor, drive wheels, and electronics will be between 9 and 11 pounds.
Harness systems will total around 3 lbs.
The remaining wheels should add 3-4 more pounds.
This brings our total weight to around 25.5 lbs. With commercially available gait trainers and walkers weighing about 30 lbs this is an acceptable weight for our design. The drive system will also offer help in maneuvering the walker.
CAD Drawings
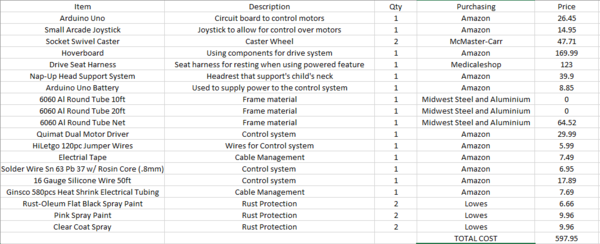
Bill of Materials
Lower Frame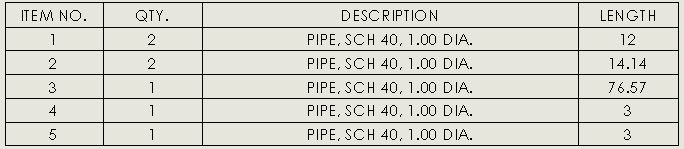
Upper Frame
Assembly Instructions
Fabrication Process
- Bent aluminum tubing for the frame
- Assembled other frame components together by welding
- Drilled, tapped, and threaded any necessary holes on the frame
- Fabricated custom part to mount drive wheels onto the frame
- Fabricated headrest piece
- Fabricated plastic tray
- Sewed head support to make it smaller for the child's head
- 3-D Printed end caps and housing for electrical components
- Sanded and polished frame to get ready for powder coating
- Painted frame
- Tuned the motor controller and joystick code

Hoverboard testing setup

Picture of frame halfway through fabrication

Paul tapping holes

Ryan drilling holes

Barrott cutting out the tray

Sam working on the joystick code

Finished frame without drive wheels
Testing and implementation
At the moment, the motors are not working, so we will finish that aspect of the project with the help of Dr. Canfield next semester. We hope to deliver in January. The frame itself works very nicely, and it rolls pretty smoothly. We made the frame adjustable in many different ways, so once we deliver it to our child, we will be able to get the correct height adjustments on each component.
Photos of Completed design
Finished frame without the drive wheels
Instructions for safe use
Provide a clear summary of safe use for the family. Do not use the device unless supervised by an adult that has been fully understood the safe use of this product.
Here are some safety warnings and instructions to using the motorized walker.
- Do not use if you weigh over 60 lbs
- Do not sit/stand or set heavy objects on the frame. This will bend or possibly break it.
- If the motor is on, do not try to grab the wheels or electrical components.
- Do not pull or cut any visible wires.
- Do not kick or shake the housing for the electrical components.
Project Summary, Reflection
This project proved to be a huge learning experience for all four of us. Not only were we tasked with building an adjustable walker with many supports, we were also tasked to make it motorized. Building the actual frame of the walker took several weeks to do, because of the need to make it be able to grow with her. This caused us to move away from the original design slightly, but we ended up with a walker that will suit our child's needs and assist her as she begins walking. The motorization of the walker began weeks before the walker was due, but after hours of testing with Professor Tristan Hill, we learned that we would need to purchase a new motor driver, and this came in the week of finals. Unfortunately, due to tight schedules, we were unable to get the motors working properly. So, we hope to finished the project at the beginning of next semester and deliver in January. We hope that our child will be able to use the frame to help her learn how to walk and grow up with it.
We would like to give a massive thank you specifically to Jeff Randolph, Chris Mills, and Jacob in making our project possible by assisting us in the shop whether it was ordering parts, giving design ideas, fabricating custom parts, or welding. We would also like to thank other shop members who helped us.
Also, a huge thank you to Dr. Canfield and Professor Hill for assisting us in the motor aspects of the walker. It truly would not have been possible without their help.
Finally, we would like to thank Keller's Kustom Upholstery and Autotrim for sewing together our headrest. It was very gracious of them to do it so quickly and happily.