Training With Trikes
Contents |
Abstract
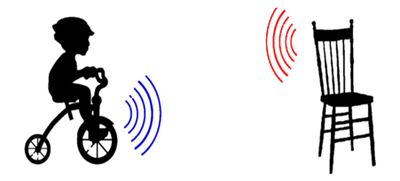
This project involves the design, testing, and commercialization of an adaptive tricycle for children who are visually impaired. The tricycle will combine sensors with basic processing to create a map of the immediate area in front of the tricycle. The system will then identify obstacles that the child should avoid and locate them within a coordinate system. The child will then be alerted to these obstacles and their location through haptic feedback in the handlebars so that he or she can avoid the obstacles entirely.
Background
Currently there are no commercial products that meet the customer requirements. Some existing products, such as the NavBelt and iGlasses, combine sensing with haptic feedback to help the user navigate (Shoval, Bornstein, & Koren, 1998) (iglasses, n.d.). Yet, these solutions aren’t ideal for children, can’t easily be used to improve physical development, and are relatively expensive. The idea for this project stems from one of Dr. Canfield’s EIME projects, in which the team was tasked with developing an adaptive tricycle for a toddler with cyclic blindness. This sparked an idea—if we can impact the life of one child through adaptive devices, then we should impact the lives of thousands of children.
Problem Definition
A child’s proper development is dependent on daily physical activities as well as mental stimulation. Therefore, activities such as running, bicycling, swimming, or aerobics are essential to a child's development. Too often, though, children who are visually impaired cannot take part in these activities. One particular activity that children who are visually impaired cannot typically participate in is independently using ride-on toys such as tricycles. Riding a tricycle provides both fun and fitness, and is a therapeutic activity that allows children to exercise their lower extremities. As the muscles move through cycling motions, they are flexed, extended and stretched. This range of motion is crucial for children with disabilities because muscles are incapable of keeping up with bone growth unless fully extended. Cycling also has the added benefit of strengthening motor control development (Benefits of the Adaptive Tricycle as a Therapeutic Activity, n.d.).
Need Statement
Unfortunately, there are not any commercially available tricycles that children who are visually impaired can operate independently and safely. As such, our team has partnered with Dr. Steven Canfield to develop an adaptive tricycle for children who are visually impaired. The end goal is to create a product that is suitable for commercialization.
Team members
Group IV
- Gerald Alexander
- Jared Hughes
- April Parkison
- Chance Williams
Acknowledgments
- Dr. Steven Canfield
- Dr. Meenakshi Sundaram
- Chris Mills
- James Brown
- Jeff Randolph
- Scott Hill
- Sonja Higgenbotham
- Tristan Hill
Methodology
The primary purpose of the tricycle is to provide a fun activity that will help them develop strength and motor skills in the same way as sighted children. The tricycle system will use an array of sensors in addition to basic processing to map the environment in front of the tricycle and will communicate relevant obstacles to the child through haptic feedback. The overall approach for our project will first consist of choosing the optimal setup via theoretical analysis and then will follow multiple iterations.
Design Components & Variables
- Sensors: The main two types of sensors that we are researching are ultrasonic and infrared. Ultrasonic sensors are very accurate and work well outside, but they tend to be expensive and can lose accuracy by sound absorbing objects. Infrared sensors are relatively inexpensive and easy to work with, but they have a narrow beam width, signal decay, and can be unreliable in bright sunlight.

- Sensor Configuration:
- Three ultrasonic sensors- This design has the most range, but the sensors will likely experience interference issues.
- Two infrared sensors and one ultrasonic sensor- This design has good coverage, but it lacks the necessary beam overlap needed to locate objects in the coordinate plane.
- Four infrared sensors- This design is inexpensive, but it has the smallest range.
- Haptic Feedback: Mini vibration motors are being used to provide haptic feedback to the children. The specific number of motors and orientation on the handlebars is yet to be determined.There are two different options for communicating the relative distance of the object to the user. The vibration strength can change in proportion to how far away the object is or the vibration can be at a constant strength and the frequency at which it pulses can change in proportion to the distance.

- Other Options: The addition of optional features that will increase the ease of use for the end user are also being considered.
- Battery recharge circuit
- Battery power level indicator
- Vibration strength control knob
Progress
- Met with sponsor
- Market research
- Researched electronic components
- Researched sensors
- Circuitry design and analysis
- Sensor Analysis
- Written preliminary sensor code
Future Steps
- Create detailed drawings
- Finalize prototype design
- Write preliminary haptic feedback code
- Assemble sensor system
- Assemble haptic feedback circuit
- Test sensor system
- Test haptic feedback system
- Assemble Prototype
- Extensive prototype testing